聯系人:許女士
手機:13750762992
電(diàn)話:400-8013780
地址:浙江省嘉善縣羅星街(jiē)道人民(mín)大道2355号
官網:www.yili-robot.com
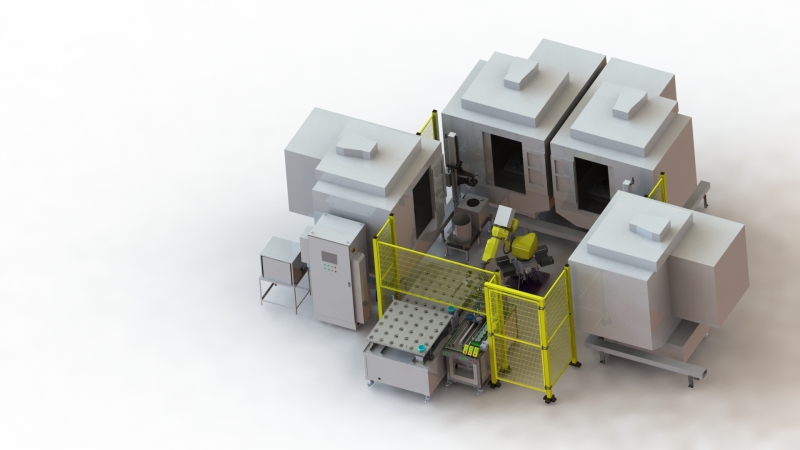
床桁架機器人(一對一)")
産(chǎn)品概述:
多(duō)工(gōng)位圓盤旋轉上下料桁架機械手,工(gōng)位數最 大可(kě)至 16 工(gōng)位,
實現圓盤工(gōng)件與車(chē)床等加工(gōng)設備的自動上下料,工(gōng)件外徑 15-45mm 範圍内可(kě)以通用(yòng)。
未來發展變化趨勢如何:
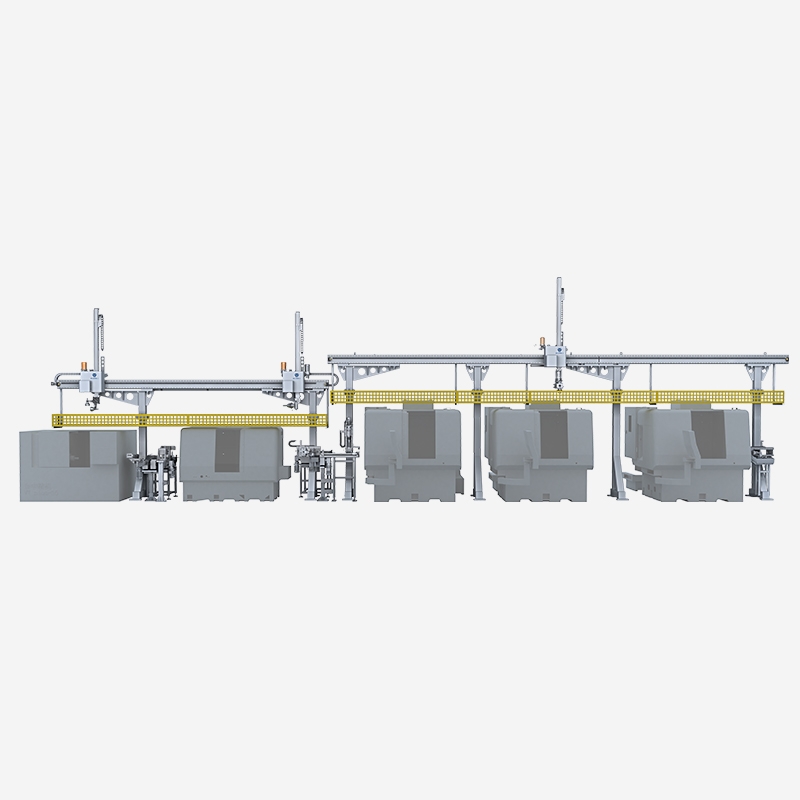
如今科(kē)技(jì )發展迅速以緻變革不斷發生,在某些環節逐步使用(yòng)自動化、半自動化設備進行輔助操作(zuò),使工(gōng)人從繁重的勞動中(zhōng)解放出來。各個機器人行走軸,均可(kě)采用(yòng)滾輪導軌,具(jù)有(yǒu)可(kě)高速運行,安(ān)裝(zhuāng)調試方便,适合長(cháng)行程應用(yòng),可(kě)用(yòng)于惡劣等優點。
機床上下料機構将待加工(gōng)工(gōng)件送裝(zhuāng)到機床上的加工(gōng)位置,将已加工(gōng)工(gōng)件從加工(gōng)位置取下的自動或半自動機械裝(zhuāng)置,又(yòu)稱工(gōng)件自動裝(zhuāng)卸裝(zhuāng)置。 其中(zhōng)由于具(jù)有(yǒu)操作(zuò)簡便 直觀等特點,能(néng)很(hěn)好現代企業越來越嚴苛的要求,而桁架機械手不斷發生如下變革在自動化程度越來越高的生産(chǎn)線(xiàn)上扮演着不可(kě)替代的角色。
發展有(yǒu)“感覺”機械手,機械手是集力學(xué)、機械、傳感和計算機技(jì )術等多(duō)個學(xué)科(kē)的交叉,桁架機械手的進步發展依賴于某些相關技(jì )術的發展。 隻有(yǒu)這樣,才能(néng)使伺服電(diàn)動機桁架機械手輸送的高響應、高剛度及高精(jīng)度要求。在選擇伺服電(diàn)動機的情況下,根據物(wù)料運動的距離和運行節拍,計算出伺服的位移和軌迹,對驅動器PID參數進行動态。
床機器人")
137-5076-2992
浙江省嘉善縣羅星街(jiē)道人民(mín)大道2355号
網址:www.yili-robot.com
400-801-3780

業機器人")

業機器人")